YOLO-Based Water Cannon Auto-Aiming System
Dec 12, 2024 — Jun 30, 2026
·
2 min read
Introduction
This is a college innovation project (Project No. 20251983), relying on the resources of Sun Yat-sen University’s School of Systems Science and Engineering and Robotics Association, supervised by Associate Professor Hou Yanqing https://ssse.sysu.edu.cn/teacher/252, belonging to project initiation, initially understanding the content related to vision and robot control.
Hardware Platform
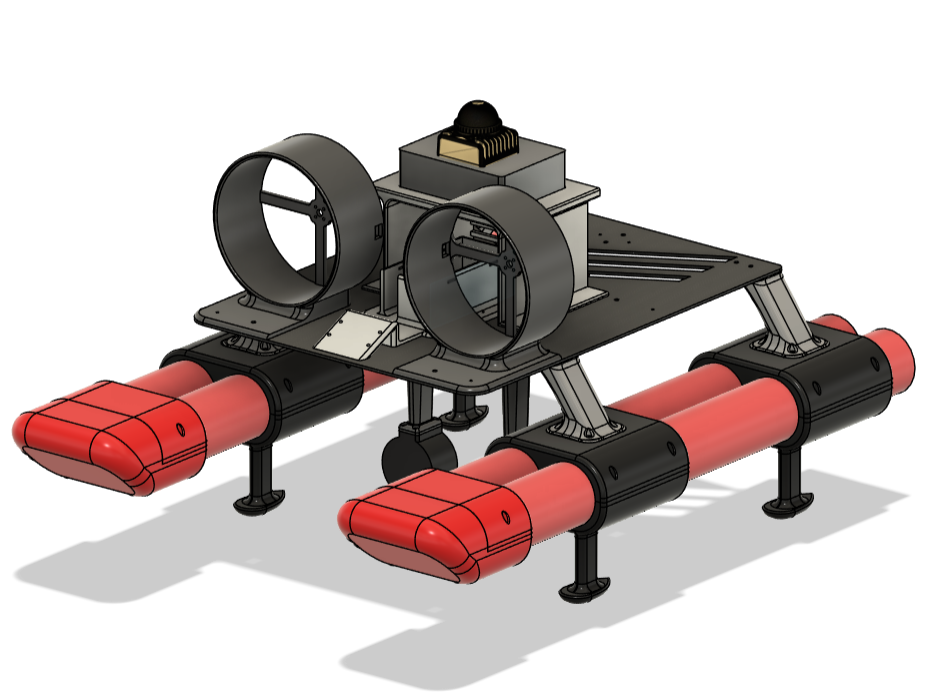
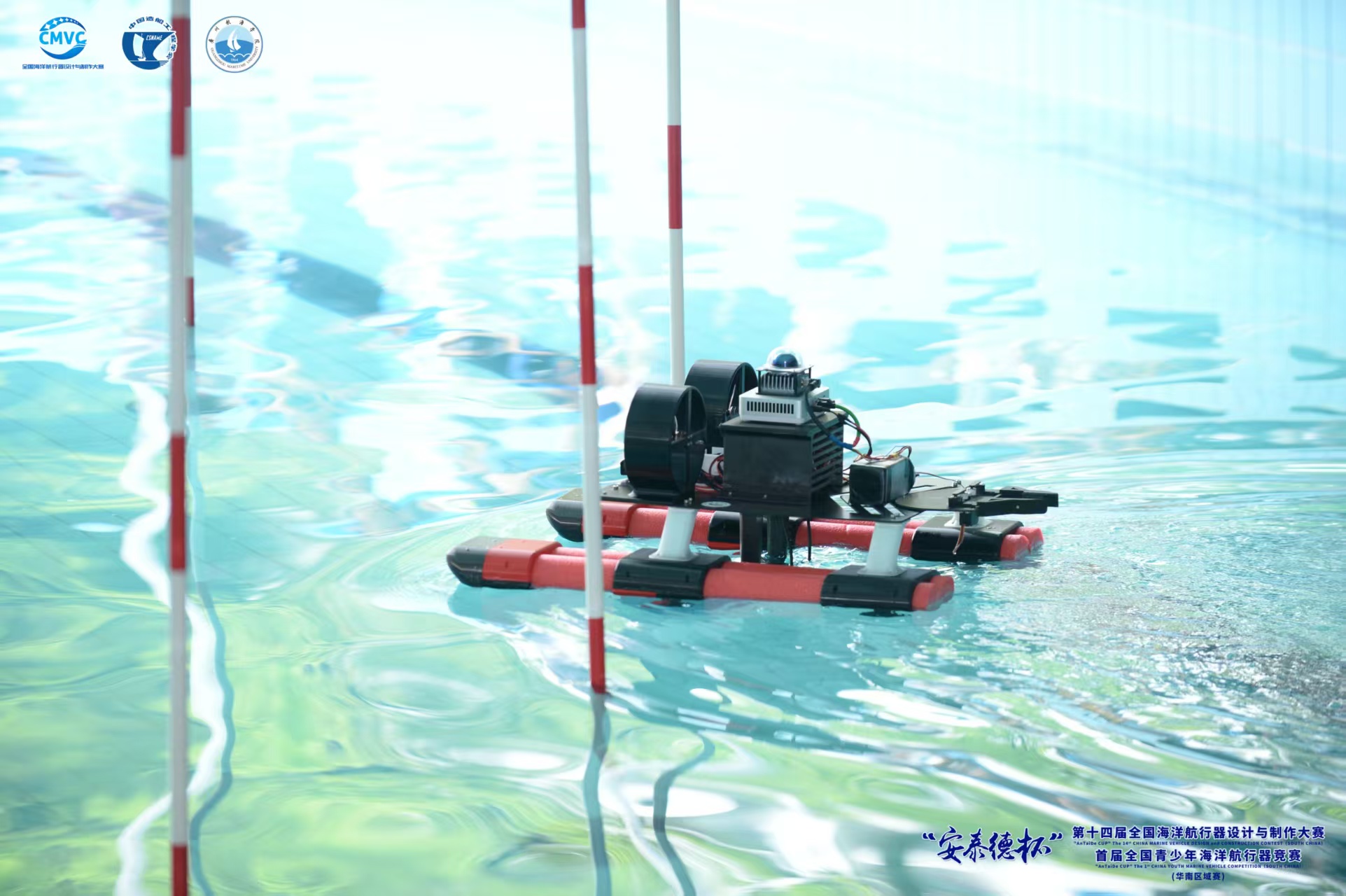
Dual-Hull Unmanned Boat Design
A high-strength catamaran with dual propulsion systems for enhanced stability and power. For details, see zephyr
Hardware Configuration
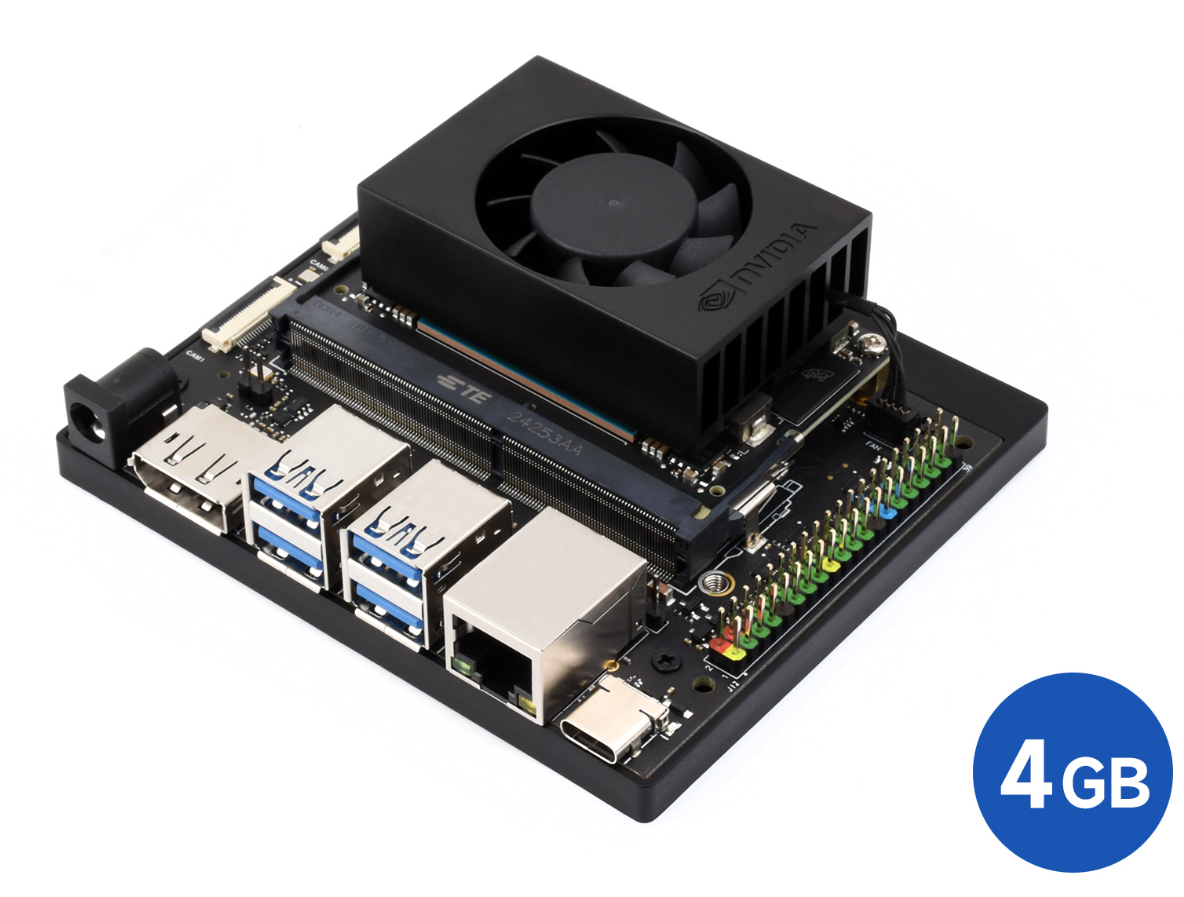
- Mainboard: NVIDIA Jetson Xavier NX Super for GPU inference.
- Servo Gimbal: Fashionrobo intelligent servos with serial communication and PID control.
- Camera: Nuwa HP60C depth cameras for 3D perception and distance measurement.


Algorithm Design
Modular ROS2 Architecture
- Framework: Node-based architecture separating perception, decision-making, and execution for asynchronous communication and concurrent processing.
- Benefits: Improves performance, scalability, and maintainability.
Adaptive Control Algorithms
- PID Integration: PID control with auto-tuning for servo motors, including anti-windup, low-pass filtering, and dead-zone compensation to reduce power consumption and eliminate oscillations.
System Architecture
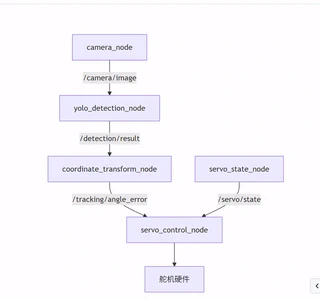
Built on ROS2, divided into three layers:
Perception Layer
- Camera Monitor Node: Handles USB/depth camera inputs, publishes image streams to
/camera/image. - Object Detection Node: Uses YOLOv8 for real-time detection, publishes bounding boxes and confidence scores to
/detection/result.
Decision Layer
- Tracking Calculation Node: Transforms pixel coordinates to angular errors using camera FOV parameters.
Execution Layer
- Servo Control Node: Implements adaptive PID controllers with auto-tuners for precise actuation.
- Servo Monitor Node: Monitors voltage, temperature, and position for safety.
Integration
- Launch Package: One-click startup with configurable parameters for depth camera integration.
Key Achievements
Python Monolithic System (v1.1.8 / AIM V1.0)
- Software: “AIM Intelligent Target Tracking System” with multi-threaded architecture, SimplePID controller, SimpleTargetTracker, and CoordinateConverter.
- Features: Intelligent degradation protection, auto-tuning, and monitoring.

Project Team
- Project Leader: Cu Disheng (Information Engineering, 2023)
- Team Members: Cen Dai, Liu Chaoyin, Mao Lishan (Information Engineering, 2023)
- Supervisor: Hou Yanqing (School of Systems Science and Engineering)
