Zephyr Catamaran USV Design
Project Overview
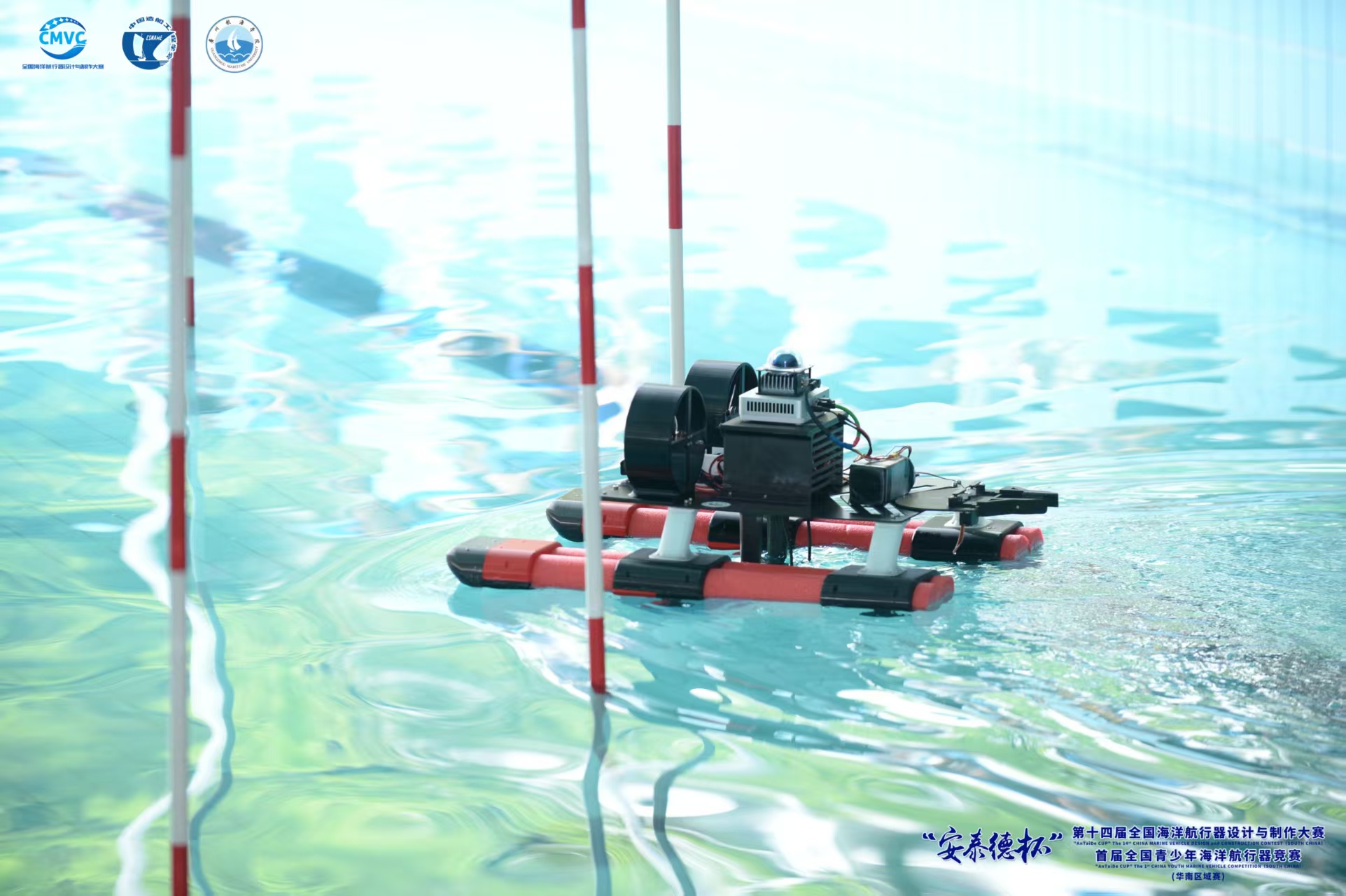
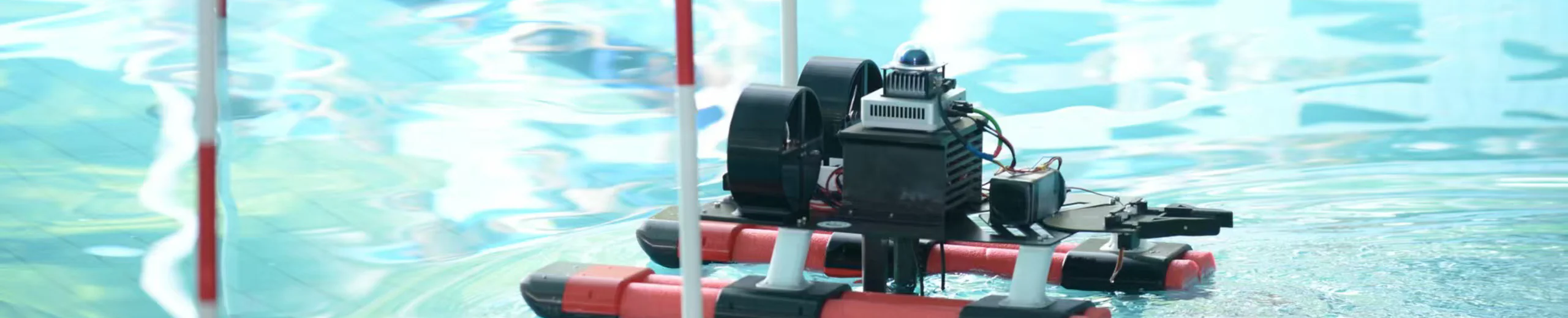
This project proposes a catamaran-based USV design combining high maneuverability, stability, endurance, and multi-task expansion. Advanced remote control and LiDAR-based SLAM enable precise control and environmental perception.
Innovations
Catamaran structure with dual thrusters and ducted propulsion for efficiency and cooling. Modular tail release for quick gripper swaps. Multi-system control integrating DJI O4pro video transmission, ELRS remote control, and Mid360 LiDAR with fastlio-SLAM in Nav2 for autonomous navigation.
Design Approach
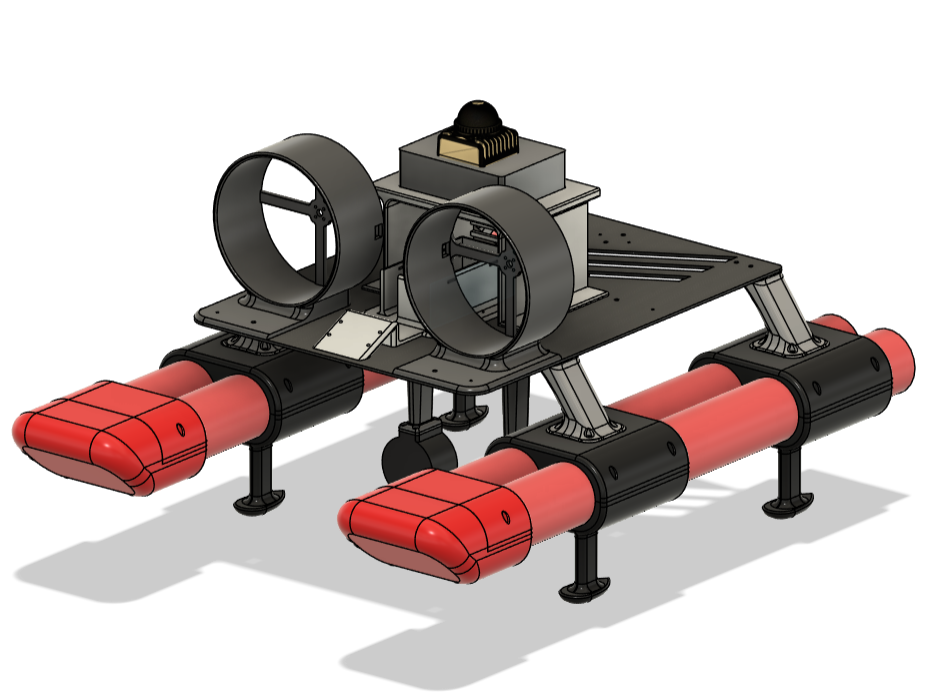
Structural: Catamaran base with thrusters for steering, streamlined shapes for lift and drag reduction, ducted propulsion for stability and cooling, modular 3D-printed tail mechanism for versatile gripping.
Functional: DJI O4pro for 4K video transmission up to 15km; ELRS for long-range control up to 25km. Autonomous system uses Mid360 LiDAR with fastlio mapping, GICP relocalization, and TEB planner in Nav2 for real-time path optimization in radio-denied environments.
Bill of Materials (BOM)
| Level | Component Name | Material | Quantity | Cost |
|---|---|---|---|---|
| 1 | Catamaran | |||
| 1.1 | Buoyancy Unit | |||
| 1.1.1 | Foam Buoyancy Rod | Pearl Foam | 4 | 40 |
| 1.1.2 | Fairing | PETG | 2 | 20 |
| 1.2 | Thrusters | 2 | 600 | |
| 1.3 | NUC Mount | PETG | 1 | 5 |
| 1.4 | Mid360 LiDAR | 1 | 4000 | |
| 1.5 | ELRS Receiver | 1 | 50 |
