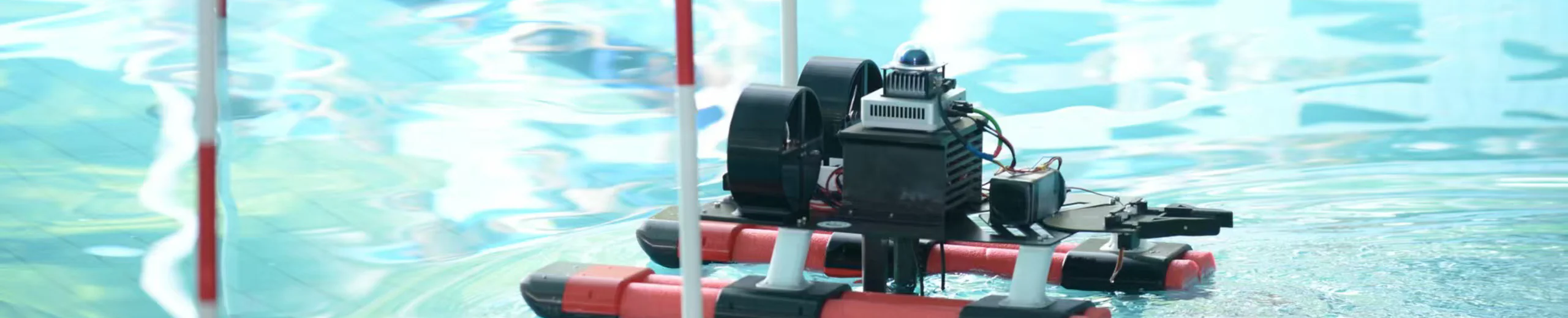
Zephyr Catamaran USV Design
Project Overview


Background
With the rapid development of unmanned technology and intelligent control systems, unmanned surface vehicles (USVs) have become essential technological equipment in fields such as ocean exploration, environmental monitoring, waterway patrols, and emergency rescue. While traditional monohull designs are simple, they face limitations in maneuverability, speed, and payload expansion. In contrast, catamarans, with their superior stability and reduced hydrodynamic resistance, have emerged as a key direction for USV development.
In surface navigation tasks, USVs must achieve high maneuverability in complex waters while maintaining strong environmental adaptability and task execution capabilities. By integrating differential control, streamlined hull optimization, ducted propulsion technology, and intelligent task modules, the overall performance of USVs in complex application scenarios can be significantly enhanced.
Significance
This project proposes a catamaran-based design that combines high maneuverability, stability, endurance, and multi-task expansion capabilities. Through differential control, fluid optimization, and multi-propulsion system coordination, the design improves navigation efficiency and environmental adaptability. Additionally, advanced remote control systems and LiDAR-based SLAM autonomous planning technologies enable precise remote control and environmental perception.
Innovations
1. Catamaran Structure and Multi-Propulsion Coordination
- Design: The catamaran design integrates dual underwater thrusters with differential control and dual surface ducted propulsion systems, achieving a balance of high maneuverability, stability, and speed.
- Advantages: Enhances control performance and propulsion efficiency in complex waters. The ducted propulsion system also provides auxiliary cooling for onboard electronics.
2. Modular Tail Release Mechanism
- Features: A modular, easily replaceable tail release mechanism supports quick swapping of grippers for tasks such as buoy deployment and probe release, enhancing task adaptability.
3. Multi-System Intelligent Control
- Integration: Combines DJI O4pro digital video transmission with ELRS long-range remote control systems for high-resolution video feedback and low-latency control.
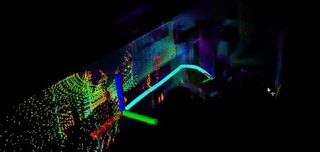
- SLAM Technology: Utilizes the Mid360 LiDAR and fastlio-SLAM mapping algorithm within the Nav2 framework for autonomous localization, environmental perception, and path planning.
Design Approach
I. Structural Design
(1) Catamaran Base Structure and Propulsion Control
The catamaran design leverages dual underwater thrusters with differential control to achieve agile steering. By adjusting the speed difference between the two thrusters, the USV can precisely change its direction, whether for small-angle adjustments or large turns, greatly enhancing maneuverability.
(2) Streamlined Design for Lift and Drag Optimization
The streamlined design minimizes air and water resistance during navigation. Special curved surfaces and angle adjustments optimize the structure in contact with water, generating additional lift. This lift partially raises the hull, reducing the wetted area, which further decreases drag, increases speed, and improves energy efficiency.
(3) Dual Surface Ducted Propulsion System
The dual surface ducted propulsion system serves multiple functions:
- Provides strong thrust to assist underwater thrusters, enhancing overall propulsion.
- Stabilizes the hull by coordinating with the differential control of underwater thrusters, reducing vibrations and improving stability.
- Generates airflow for cooling onboard electronics, ensuring optimal operating temperatures and extending equipment lifespan.
(4) Tail Release Mechanism
The tail release mechanism features a modular design with high-strength 3D-printed components. It securely grips cylindrical or irregular objects, ensuring stability during motion. The standardized interface allows users to quickly swap grippers for various tasks, such as deploying probes or attaching mission modules. This modularity enhances versatility and simplifies maintenance.
II. Functional Design
(1) DJI Digital Video Transmission System and ELRS Remote Control System
The DJI O4pro digital video transmission system offers outstanding imaging capabilities. Key specifications include:
- Sensor: 1/1.3-inch image sensor with a 155° FOV, f/2.8 aperture, and 12mm equivalent focal length.
- Video: Supports 4K recording at up to 120fps, with MP4 format and a maximum bitrate of 130Mbps.
- Transmission: Advanced digital transmission with H.265 encoding, enabling 1080p/100fps video streaming over distances up to 15km in open environments. Strong anti-interference capabilities ensure stable operation in complex electromagnetic environments.
The ELRS (ExpressLRS) remote control system operates on 915MHz or 2.4GHz frequencies, achieving long-range communication via LoRa modules. Key features include:
- Transmission Power: 1W for the transmitter, 100mW for telemetry.
- Range: Over 25km in open environments.
- Precision: Converts RF signals into CRSF digital control signals for precise long-range operation.
(2) Autonomous Detection and Planning System
Bill of Materials (BOM)
| Level | Component Name | Material | Quantity | Cost |
|---|---|---|---|---|
| 1 | Catamaran | |||
| 1.1 | Buoyancy Unit | |||
| 1.1.1 | Foam Buoyancy Rod | Pearl Foam | 4 | 40 |
| 1.1.2 | Fairing | PETG | 2 | 20 |
| 1.2 | Thrusters | 2 | 600 | |
| 1.3 | NUC Mount | PETG | 1 | 5 |
| 1.4 | Mid360 LiDAR | 1 | 4000 | |
| 1.5 | ELRS Receiver | 1 | 50 |
